

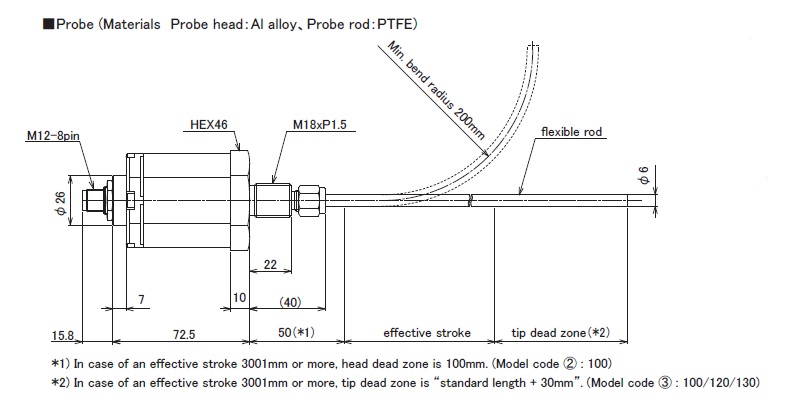
The material of the probe rod of GYSE-FX isn't SS304 but PTFE.
That's the structure which made the rod part have the flexibility,
so position detection by a like curved line is possible .
(bend R : Min. 200mm).
It's able to detect it with a high accuracy because a GYSE series is
being used inside the sensor.
Max. stroke is 7500mm.
And with the captive software (GPM), zero and gain adjustment is
possible at user side. It is possible in thin type GYMRA.
・ CE marking
・ Noise cancellation
・ GPM setting
( Created on Dec.4. 2025 )
| Non-linearity | ≦±0.125%FS Typ. |
|---|---|
| Resolution | 16bit (1/65536) |
| Repeatability | ≦±0.005%FS (Min. ±3μm) |
| Temp. drift | ≦±100ppmFS/°C |
| Position (Std.) | 0〜10V (output current : Max.5mA, load : Min.2kΩ) or 4〜20mA (load : Max.500Ω) |
| Velocity (Option) | ±10V or 4〜20mA Resolution :16bit (1/65536) |
| Alarm | Open drain 50V 0.1A (for magnet missing) |
| Power supply | +24(±2)VDC (80mA) (*) |
| Sampling freq. | Std. 1kHz (up to stroke 1000mm) |
| Max. Pressure | 5MPa (probe rod) |
| Operating temp. | 0°C〜+65°C |
| Storage temp. | -20°C〜+65°C |
| Vibration | 3G (or 40Hz 1mmPP) |
| Shock | 10G (2msec) |
| IP grade | IP63 (rod) |
・The above mentioned accuracy applies to sensors with an effective stroke of 300mm or more.
・The specification of stroke less than 300mm is equal that of stroke 300mm.
(*) The consumption current is 100mA in case of adding OUT2 option (Model ⑧).

① Effective stroke
15〜7500mm
② Head dead zone
50 : 50mm (Std.)
□ : □mm (option)(specified by customers)
・Possible Min. length depends on the selected magnet or float.
③ Tip dead zone
□ : 70mm/ 90mm/ 100mm (Std.)
| tip DZ | magnet | float |
|---|---|---|
| 70mm | M2PN, M0SM, M0LM, M3,M11N,BA | F25N,F28N |
| 90mm | F28S,F30S | |
| 100mm | T144,T163 | F40S,F42S,F50S,F54S |
④ Thread / Rod diameter
N-FX6 : M18xP1.5, flexible rod Φ6
| magnet | float |
|---|---|
| M2PN :No.2PN (Std.) M0SM :No.ΦSPM M0LM :No.ΦLPM M3 :No.3 M11N :No.11N T144 :No.T14-M4 T163 :No.T16-M3 BA : No.2KYN-17-LG | F28S:Φ28 SS316L F30S :Φ30 SS316L F40S :Φ40 SS316(B) F42S :Φ43 SS316L F50S :Φ50 SS316L F54S :Φ54 SS304 F25N :RF-A10 plastic F28N :RF-A6 plastic |
・Selecting magnet from page 116〜118 (GG).
・Please consult our factory in case of requesting special magnet or float.
・This model code means only specifying associated magnet or float.
・Ordering magnet or float individually.
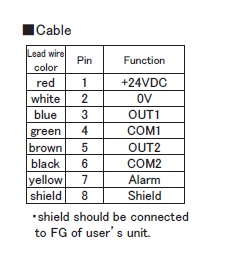
⑥ Cable connection
8P : connector(M12-8pin)
△G□F : pigtail / cable end : free
△G□A : pigtail / cable end : with connector for relay
(□ : cable length(m)、Max.10m)(*)
(△ : cable type
S:standard, H:high temp. cable, R:robot cable, UL : cUL cable)
CN : existing connector (Please refer to page 115 of option.)
(*) In case of using extension cable
Voltage output : sensor cable (m) + extension cable (m) ≦ 10m
Current output : sensor cable (m) + extension cable (m) ≦ 100m
・Please confirm extension cable on page 120〜122.
・Ordering loose mating connector individually.
⑦ Position output (OUT1)
AD :0〜10V ( When magnet moves toward tip, output increase )
AR :10〜0V ( When magnet moves toward tip, output decrease )
BD :4〜20mA ( When magnet moves toward tip, output increase )
BR :20〜4mA ( When magnet moves toward tip, output decrease )
CD□□ : bipolar output( -□V〜+□V )
( for example CD10:-10V〜+10V )
CR□□ : bipolar output( +□V〜-□V )
( for example CR05:+5V〜-5V )
V Z/F : option (specified voltage)
( for example V1/5:1〜5V, V9.5/0.5:9.5〜0.5V )
I Z/F : option (specified current)
( for example I5.2/20:5.2〜20mA, I18/5:18〜5mA )
【 Z=output at zero position, F=output at full position 】
⑧ Option : Analogue output (OUT2)
・N :without option (Std.)
・Position output :select from ⑦
・Velocity output(Note1)
VA[ ]:±10V
WB[ ]:4〜20mA
[ ]:max. velocity(1.00〜999 mm/s)
< ex.9R99 : max. velocity = 9.99 mm/s >
(Note1)
VA : When magnet stops, output is 0V.
When moving toward probe tip, +10V.
WB : When magnet stops, output is 4mA.
When moving in any direction, 20mA.
| Probe | Connector & Pigtail | Cable | ||||
|---|---|---|---|---|---|---|
 |  | |||||