
- HOME
- 製品情報
- インテリジェント・リモートデバイスシステム
- IRDS-SV
IRDS-SVインテリジェント・リモートデバイスシステム
インテリジェント・リモートデバイスシステム
IRDS-SV

本モジュールは、IRDシリーズの油圧/空圧サーボコントローラモジュール(単純適応制御理論)です。
1軸の油圧/空圧シリンダを利用して高精度な位置制御、荷重制御を簡単に構成することができます。
<特長>
・IRDマスタモジュールを通して産業用ネットワーク
(CC-Link, CC-Link IE Field, EtherNet/IP, EtherCAT, PROFIBUS)上位機器とデータ交換
・現代制御理論のひとつである単純適応制御(SAC)を採用し、
制御対象のパラメータ変動や経年劣化の影響を自動的に吸収するロバスト制御を実現
・DSPにより上位PLCおよび産業用ネットワークのサイクルタイムに
関係なく0.2msサンプリングで高速サーボ演算可能
・サーボ位置フィードバック信号としてGYセンサを利用することで、
スケーリング可能な最高1μmの分解能で高精度位置決めシステムを構成することが可能
・アナログ電圧/電流入力を2チャンネル搭載し、ロードセルや圧力センサの差圧を利用しての荷重制御に対応
・自動転送機能:他のIRDS-SVやスレーブモジュールと同調制御
・制御軸切替機能:GYセンサ/アナログフィードバックの中から、任意の制御軸を切替
・モジュール内に1軸のモーションプログラム機能を搭載
・アラーム検出機能:センサ上下限リミット、サーボ偏差やサーボ発振アラーム
・自己診断機能:内部ハードウェア異常、センサ未接続、センサデータ異常
・RoHS対応
<ダウンロードファイル>
・カタログ(日本語):2016030500G版
・取説(日本語):IRDS-SV_manual_jp_20241217.zip
IRDS-SV-G:2024年12月17日 第15版
IRDS-SV-E:2024年12月17日 第12版
IRDS-SV-A:2024年12月17日 第2版
IRDS-SV-F:2024年12月17日 第2版
・カタログ(英語):202005G
・取説(英語):IRDS-SV_en.zip
IRDS-SV-G:2023年9月29日 第4版
IRDS-SV-E:2023年2月10日 第3版
IRDS-SV-A:2023年7月21日 初版
IRDS-SV-F:2023年7月21日 初版
・CADデータ:IRDS-SV.dxf
・設定ソフト:IRD_Manager (ダウンロードはこちらから)
![]()
- 油圧サーボを簡単に構築したい方
- 空圧シリンダーで位置/圧力(荷重)制御を構築したい方
- 現状のPID制御に満足できない方
- 特長・機能
- 仕様
- 同カテゴリ製品との比較
製品の特長
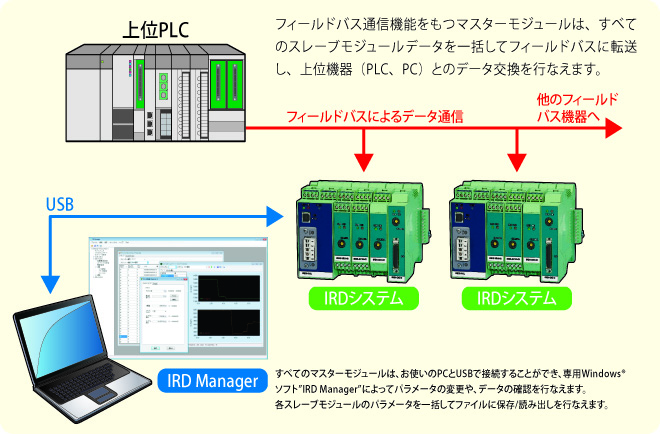
フィールドバスシステム
産業用ネットワーク通信機能を持つマスタモジュールは、全てのスレーブモジュールデータを一括して
産業用ネットワーク(CC-Link, CC-Link IE Field, EtherNet/IP, EtherCAT, PROFIBUS)に転送し、
上位機器(PLCやPC)とのデータ交換を行えます。
単純適応制御
制御対象のパラメータの変動や経年変化による影響を自動的に吸収するロバスト適応制御を実現
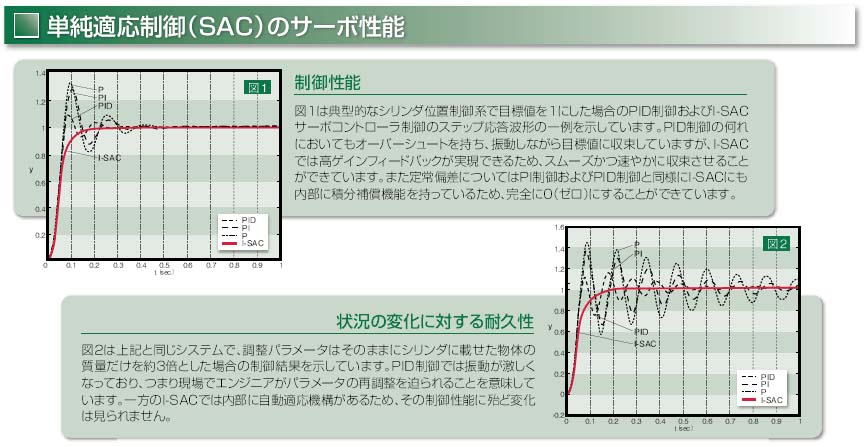
性能
仕様
| サーボ出力軸 | 1軸 | サーボサイクル | 0.2ms | |
|---|---|---|---|---|
| サーボ出力 | 電圧(±10V) / 電流(±50mA) | 出力分解能 | -30,000~+30,000(フルスケールに対して) | |
| 接続センサ | 磁歪式変位センサ(GYシリーズ) エンコーダ(A/B相パルス) |
センサ接続数 | 1軸 | |
| アナログ入力信号 | 電圧(±10V) / 電流(±20mA) | アナログ入力分解能 | -30,000~+30,000(フルスケールに対して) |
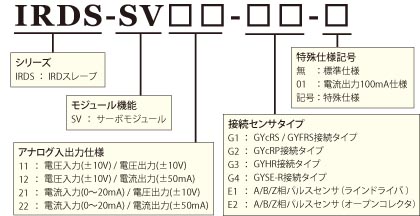
型式
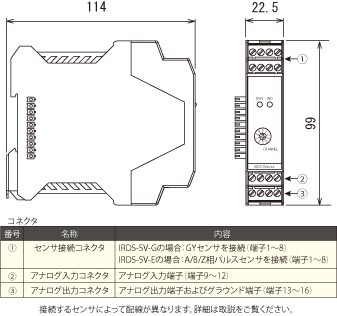
外形寸法図
|
||||||
|
|
インテリジェント・リモートデバイスシステム
| 製品名 | 区分 | モジュール種別 | 機能 | 消費メモリブロック | 入力バイト数 | 出力バイト数 | 特長 | - |
|---|---|---|---|---|---|---|---|---|
| スレーブ | 油空圧サーボ コントローラ |
サーボ コントローラ (単純適応制御) |
8 | 40 | 24 | - | - | |
| スレーブ | 差動トランス入力 | 5線式、6線式 差動トランス (4線式差動トランス) | 4 | 16 | 16 | - | - | |
| スレーブ | 波形成形 | 軸関数生成 | 4 | 24 | 8 | - | - | |
| スレーブ | 高速パルス入力 | 差動ドライバ、 オープンコレクタ入力 | 4 | 24 | 8 | - | - | |
| - | - | - | - | - | - | - | - | |
| スレーブ | 接点入力 | 高速絶縁入力 | 2 | 8 | 8 | - | - | |
| スレーブ | 油空圧サーボ コントローラ |
サーボ コントローラ (単純適応制御) |
4 | 16 | 16 | - | - | |
| スレーブ | 電磁比例弁 ディジタルアンプ |
電磁比例弁 ディジタルアンプ |
2 | 8 | 8 | - | - | |
| スレーブ | 歪みゲージ アンプ入力 |
ロードセル、圧力トランスデューサ入力(2軸) | 4 | 16 | 16 | - | - | |
| スレーブ | SSI通信 | SSIセンサ入力(4軸) | 4 | 24 | 8 | - | - | |
| スレーブ | 磁歪式リニアセンサ変換器 | GYセンサ変換器(1軸または2軸) | 4 | 16 | 16 | - | - | |
| スレーブ | 耐環境型リニア エンコーダ 変換器 |
耐環境型GMR センサ変換器 (1軸,2軸) |
4 | 16 | 16 | - | - | |
|
スレーブ | VRレゾルバ 変換器 |
S:1回転型VR レゾルバ変換器 (1軸,2軸) M:多回転型VR レゾルバ変換器 (1軸,2軸) |
4 | 16 | 16 | - | - |
| スレーブ | 関数波形生成 | 1軸または4軸の関数波形生成 | 2(1軸) 6(4軸) |
8(1軸) 24(4軸) |
8(1軸) 24(4軸) |
- | - | |
| スレーブ | ディジタル出力 | パラレル出力 スイッチ出力 |
2 | 8 | 8 | - | - | |
| スレーブ | アナログ入出力 | 電圧入出力 電流入出力 入力:2軸 出力:2軸 |
4 | 16 | 16 | - | - | |
| スレーブ | アナログ出力 | 電圧/電流出力 (4軸仕様) |
4 | 8 | 24 | - | - | |
| スレーブ | アナログ入力 | 電圧/電流入力 (4軸仕様) |
4 | 24 | 8 | - | - | |
| マスタ | Ethernet | Ethernet (Modbus/TCP) |
0 | 0 | 0 | - | - | |
| マスタ | CC-Link IE | CC-Link IE Filed通信機能搭載 | 0 | 0 | 0 | - | - | |
| マスタ | EtherCAT | EtherCAT スレーブ |
0 | 0 | 0 | - | - | |
| マスタ | PROFIBUS DP | PROFIBUS DP 通信機能搭載 |
0 | 0 | 0 | - | - | |
| マスタ | EtherNet/IP | EtherNet/IP 通信機能搭載 |
0 | 0 | 0 | - | - | |
| マスタ | CC-Link | CC-Link Ver.2 通信機能搭載 | 6 | 24 | 24 | - | - | |
| マスタ | 産業用 ネットワーク 通信機能なし |
産業用 ネットワーク 通信機能なし |
0 | 0 | 0 | - | - |
















データダウンロード