
サーボコントローラ I-SAC(アイザック)シリーズサーボコントローラ
サーボコントローラ
サーボコントローラ I-SAC(アイザック)シリーズ

【基本構成】

【ラインナップ】
・スタンドアローン(簡易版)型
・MELSEC-Qビルトインユニット型
![]()
- 油圧や空圧の制御に苦労している方
- PID制御で上手くいかない方
- デジタル制御を検討されている方
- 特長・機能
- 仕様
- 同カテゴリ製品との比較
製品の特長
単純適応制御(SAC)のサーボ性能①:制御性能
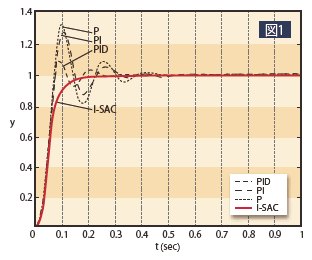
図1は典型的な空圧シリンダ位置制御系で目標値を「1」にした場合のPID制御およびI-SACサーボコントローラ制御のステップ応答波形の一例を示しています。 PID制御の何れにおいてもオーバーシュートを持ち、振動しながら目標値に収束していますが、I-SACでは高ゲインフィードバックが実現できているため、スムーズかつ速やかに収束させることができています。
単純適応制御(SAC)のサーボ性能②:状況の変化に対する耐久性
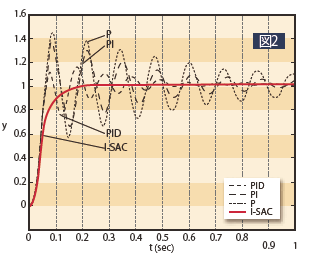
図2は上記と同じシステムで、調整パラメータをそのままにして、空圧シリンダに載せた物体の質量だけを約3倍とした場合の制御結果を示しています。 PID制御では振動が激しくなっており、つまり現場でエンジニアがパラメータの再調整を迫られることを意味しています。 一方のI-SACサーボコントローラでは内部に自動適応機構があるため、その制御性能に殆ど変化は見られません。
仕様
外形寸法図
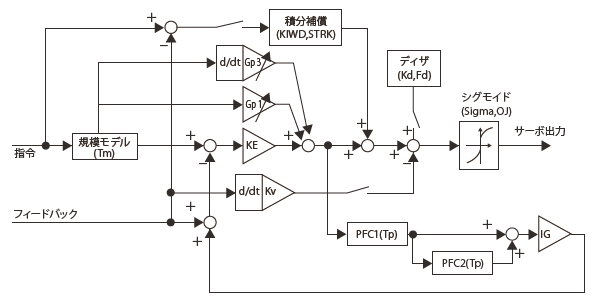
| 制御ブロック図 | ||||||
|---|---|---|---|---|---|---|
|
||||||
|
|
サーボコントローラ
| 製品名 | 位置検出方式 | 直結センサ | 指令(上位) | サーボサイクル | サーボ出力 | 出力分解能 | アナログ入力 | アナログ分解能 |
|---|---|---|---|---|---|---|---|---|
| - | - | - | - | - | - | - | - | |
| - | - | - | - | - | - | - | - | |
| - | - | - | - | - | - | - | - | |
| - | - | - | - | - | - | - | - | |
|
アブソリュート インクリメンタル |
アナログ A/B相パルス |
アナログ A/B相パルス |
5kHz (20kHz) |
電圧(±10V) 電流(±50mA) |
-30,000~ +30,000 (フルスケール) |
電圧(±10V) 電流(±20mA) |
-30,000~ +30,000 (フルスケール) |
|
アブソリュート | GYセンサ | 産業用 ネットワーク |
5kHz | 電圧(±10V) 電流(±50mA) |
-30,000~ +30,000 (フルスケール) |
2ch入力 電圧(±10V) 電流(±20mA) |
-30,000~ +30,000 (フルスケール) |
|
インクリメンタル | A/B/Z相パルス | 産業用 ネットワーク |
5kHz | 電圧(±10V) 電流(±50mA) |
-30,000~ +30,000 (フルスケール) |
2ch入力 電圧(±10V) 電流(±20mA) |
-30,000~ +30,000 (フルスケール) |
| インクリメンタル | A/B/Z相パルス | MELSEC-Q ビルトイン |
5kHz | 電圧(±10V) 電流(±50mA) |
-30,000~ +30,000 (フルスケール) |
2ch入力 電圧(±10V) 電流(±20mA) |
-30,000~ +30,000 (フルスケール) |
|
| セミ アブソリュート |
GMR2 GMR3 |
MELSEC-Q ビルトイン |
5kHz | 電圧(±10V) 電流(±50mA) |
-30,000~ +30,000 (フルスケール) |
2ch入力 電圧(±10V) 電流(±20mA) |
-30,000~ +30,000 (フルスケール) |
|
| アブソリュート | GYセンサ | MELSEC-Q ビルトイン |
5kHz | 電圧(±10V) 電流(±50mA) |
-30,000~ +30,000 (フルスケール) |
2ch入力 電圧(±10V) 電流(±20mA) |
-30,000~ +30,000 (フルスケール) |
|
| アブソリュート インクリメンタル |
アナログ A/B相パルス |
アナログ A/B相パルス |
3kHz | 電圧(±10V) 電流(±50mA) |
16bit (フルスケール) |
電圧(±10V) 電流(±20mA) |
12bit (フルスケール) |






データダウンロード